Resumen
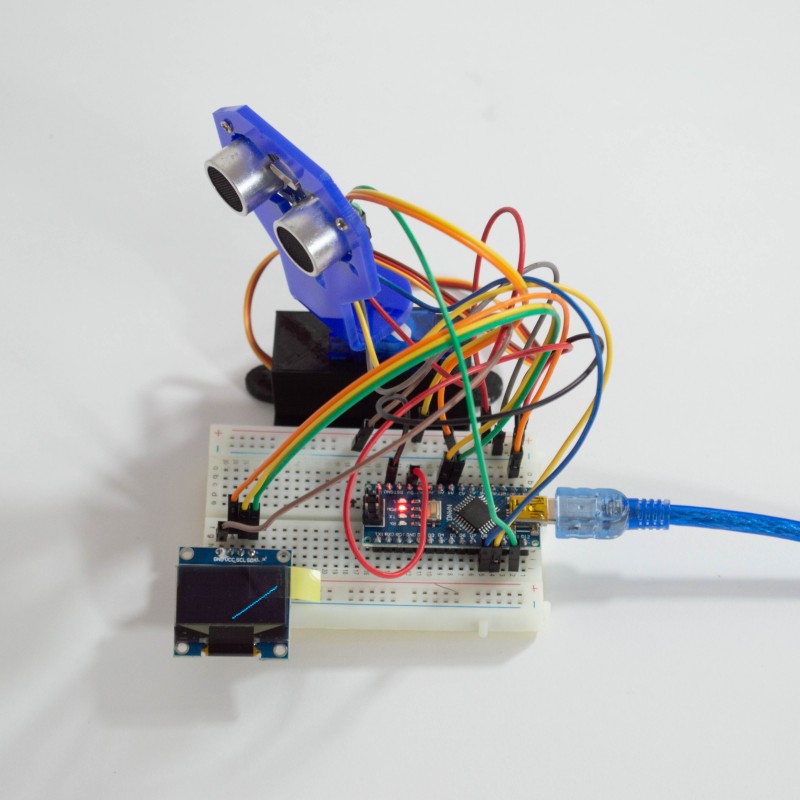
Este es un proyecto muy interesante y ├║til. Puede detectar cualquier tipo de objeto en su rango con la ayuda de un sensor ultras├│nico. El servomotor ayuda a rotar el sensor ultras├│nico para cubrir casi todas las direcciones. Esta es una versi├│n port├Ītil del Arduino Radar porque tenemos una pantalla OLED de 0.96 pulgadas para visualizar los datos. Si alg├║n objeto detectado por el radar, mostrar├Ī un s├Łmbolo de alerta con un c├Łrculo en una l├Łnea y la distancia del objeto. Aparte de esto, podemos utilizar un software de procesamiento IDE que visualiza todos los datos en una PC. Si alg├║n objeto detectado por el radar, mostrar├Ī una l├Łnea roja en el software de procesamiento. El sensor ultras├│nico es muy ├║til en muchos proyectos electr├│nicos. Lo usamos en medici├│n de distancias y detecci├│n de objetos. Entonces, en este proyecto, hemos dise├▒ado un radar port├Ītil que utiliza un sensor ultras├│nico, un servomotor y una pantalla OLED para detecci├│n y rango.
Componentes
- Microcontrolador compatible con Arduino Nano
- Placa de pruebas 400 puntos
- Servomotor SG90 180 grados 1.5Kg
- Sensor Ultrasonico HC-SR-04
- Sujetador para Sensor Ultrasonico
- Sujetador para Servo (Impresion 3D)
- Pantalla OLED 0.96 pulgadas
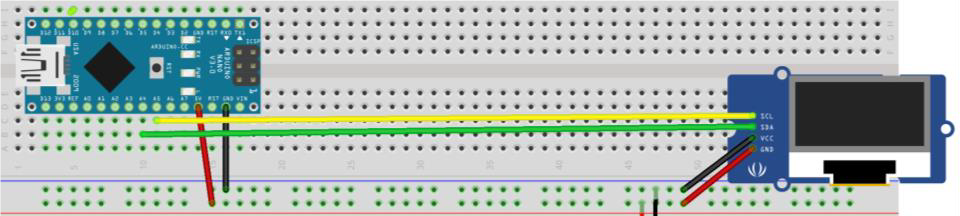
Diagrama de Conexion
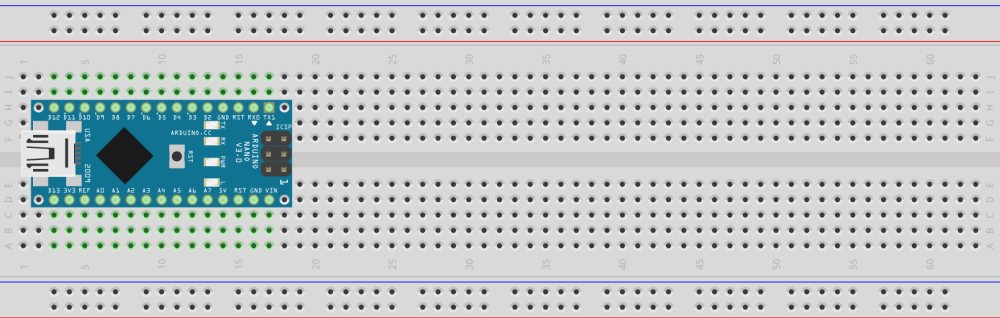
PRIMERO COLOCAMOS EL ARDUINO NANO EN LA PROTOBOARD
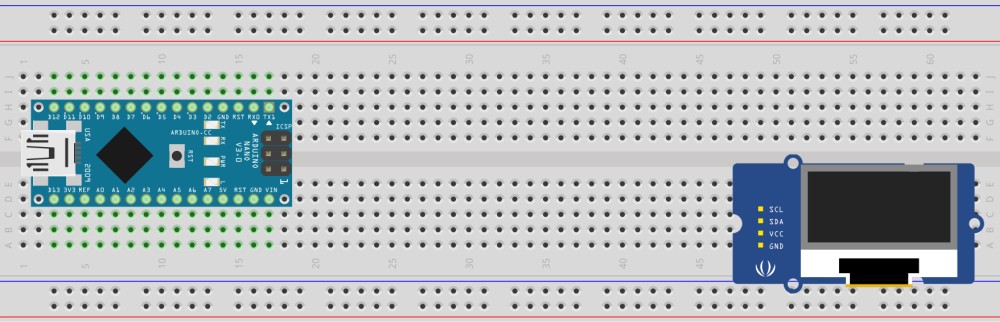
LUEGO COLOCAMOS LA PANTALLA OLED EN LA MISMA
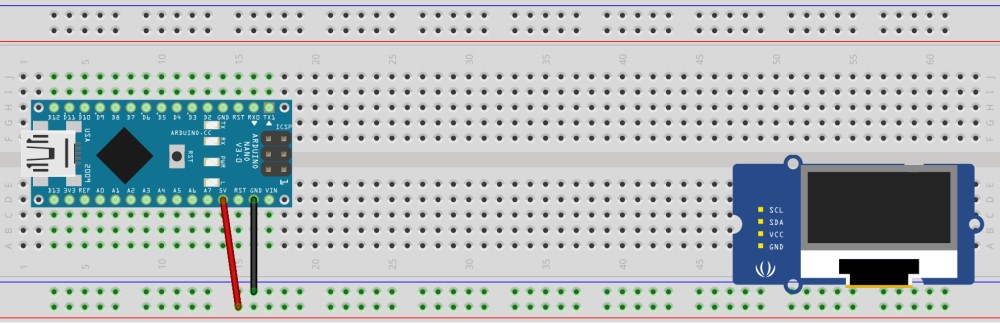
COLOCAMOS LAS LINEAS POSITIVAS Y NEGATIVAS EN LA PROTOBOARD
CONEXTAMOS LA PANTALLA OLED AL ARDUINO NANO
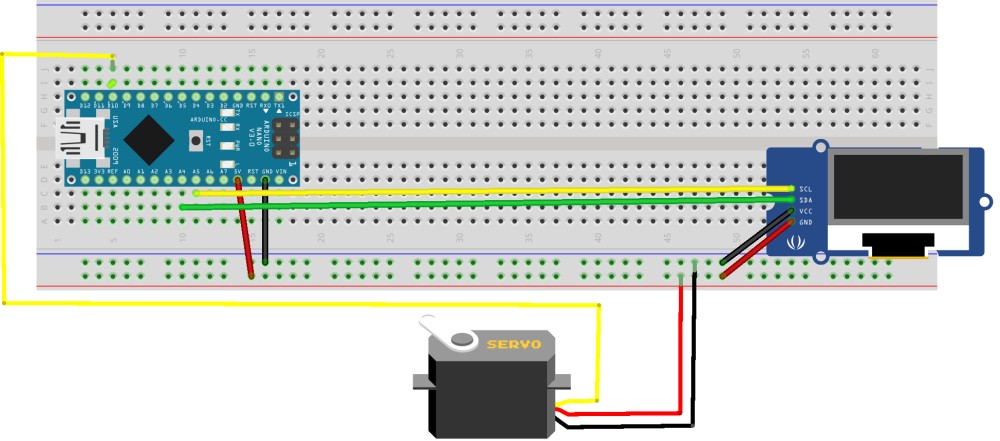
CONECTAMOS LAS ENTRADAS DEL SERVOMOTOR
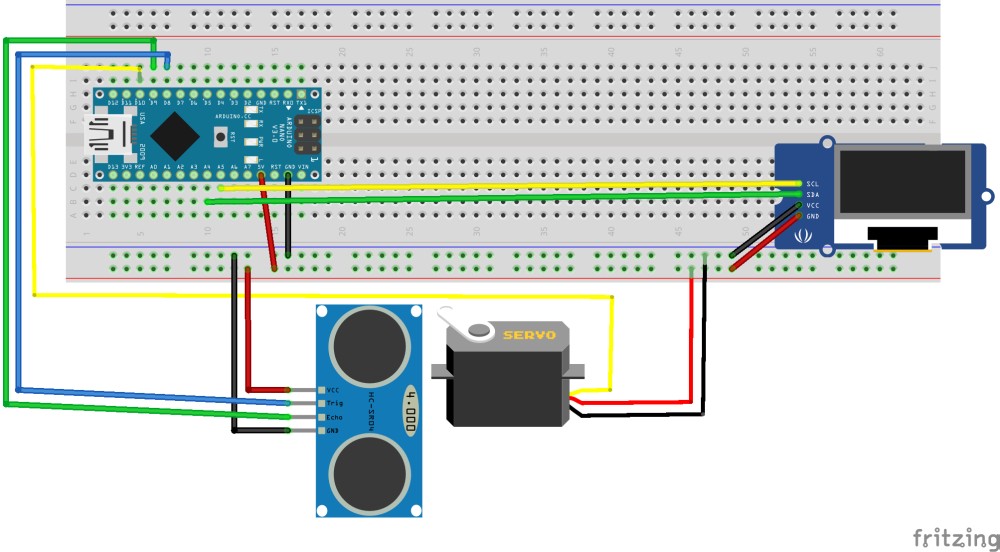
CONECTAMOS EL SENSOR ULTRASONICO
Codigo Arduino
#include <SPI.h>
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include <Servo.h>
#define Trig 8
#define Echo 9
Adafruit_SSD1306 display(-1);
Servo Servo1;
void setup()
{
// initialize with the I2C addr 0x3C
display.begin(SSD1306_SWITCHCAPVCC, 0x3C);
pinMode(Trig, OUTPUT);
pinMode(Echo, INPUT);
Serial.begin(9600);
Servo1.attach(11);
delay(1000);
Servo1.write(40);
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(20, 10);
display.println("Arduino RADAR");
display.display();
delay(2000);
}
long distance, duration, Distance;
void loop() {
int i, j, k, l, m, n; //Define Loop variables
for (i = 10; i >= 0; i -= 2) //loop for moving the line from centre left to top left
{
int servomap = map(i, 0, 10, 60, 40); //map the servo values
Distance = Distance_value(); //get the distance sensor value by calling the function
// Serial Print for processing IDE
Serial.print(servomap); // Sends the current degree into the Serial Port
Serial.print(","); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
Serial.print(Distance); // Sends the distance value into the Serial Port
Serial.print("."); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
if (Distance > 40 ) //if object is out of range (no circle will be displayed on the line
{
display.clearDisplay();
Servo1.write(servomap);
display.drawLine(64, 32, 0, i, WHITE ); //draw a line display.display();
delay(100);
}
if (Distance >= 0 && Distance <= 40) //if object is in range
{
int xmap1 = map(Distance, 0, 40, 64, 0); //map funtion for draw circle at exact location of the object
int ymap1 = map(Distance, 0, 40, 32, i);
display.clearDisplay();
Servo1.write(servomap);
display.drawLine(64, 32, 0, i, WHITE ); //draw line
display.drawCircle(xmap1, ymap1, 3, WHITE); //draw object location circle
display.fillCircle(10, 30, 1, WHITE); //object detection sign
display.fillRoundRect(10, 20, 2, 8, 2, WHITE); //object detection sign
display.display();
delay(100);
}
}
for (j = 0; j <= 128; j += 4) //moving from left to right
{
int servomap = map(j, 0, 128, 61, 120);
Distance = Distance_value();
//Serial Print for Processing IDE
Serial.print(servomap); // Sends the current degree into the Serial Port
Serial.print(","); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
Serial.print(Distance); // Sends the distance value into the Serial Port
Serial.print("."); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
if (Distance > 40 )
{
display.clearDisplay();
Servo1.write(servomap);
display.drawLine(64, 32, j, 0, WHITE );
display.display();
delay(100);
}
else if (Distance >= 0 && Distance <= 40)
{
int xmap2 = map(Distance, 0, 40, 64, j);
int ymap2 = map(Distance, 0, 40, 32, 0);
display.clearDisplay();
Servo1.write(servomap);
display.drawLine(64, 32, j, 0, WHITE );
display.drawCircle(xmap2, ymap2, 3, WHITE);
display.fillCircle(10, 30, 1, WHITE);
display.fillRoundRect(10, 20, 2, 8, 2, WHITE);
display.display();
delay(100);
}
}
for (k = 0; k <= 10 ; k += 2) //moving from top right to centre right
{
int servomap = map(k, 0, 10, 121, 140);
Distance = Distance_value();
//Serial Print for Processing IDE
Serial.print(servomap); // Sends the current degree into the Serial Port
Serial.print(","); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
Serial.print(Distance); // Sends the distance value into the Serial Port
Serial.print("."); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
if (Distance > 40 ) {
display.clearDisplay();
Servo1.write(servomap);
display.drawLine(64, 32, 128, k, WHITE );
display.display();
delay(100);
}
else if (Distance >= 0 && Distance <= 40)
{
int xmap3 = map(Distance, 0, 40, 64, 128);
int ymap3 = map(Distance, 0, 40, 32, k);
display.clearDisplay();
Servo1.write(servomap);
display.drawLine(64, 32, 128, k, WHITE );
display.drawCircle(xmap3, ymap3, 3, WHITE);
display.fillCircle(10, 30, 1, WHITE);
display.fillRoundRect(10, 20, 2, 8, 2, WHITE);
display.display();
delay(100);
}
}
for (l = 10; l >= 0 ; l -= 2) //reserve loops
{
int servomap = map(l, 10, 0, 140, 120);
Distance = Distance_value();
//Serial Print for Processing IDE
Serial.print(servomap); // Sends the current degree into the Serial Port
Serial.print(","); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
Serial.print(Distance); // Sends the distance value into the Serial Port
Serial.print("."); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
if (Distance > 40 ) {
display.clearDisplay();
Servo1.write(servomap);
display.drawLine(64, 32, 128, l, WHITE );
display.display();
delay(100);
}
else if (Distance >= 0 && Distance <= 40)
{
int xmap3 = map(Distance, 0, 40, 64, 128);
int ymap3 = map(Distance, 0, 40, 32, l);
display.clearDisplay();
Servo1.write(servomap);
display.drawLine(64, 32, 128, l, WHITE );
display.drawCircle(xmap3, ymap3, 3, WHITE);
display.fillCircle(10, 30, 1, WHITE);
display.fillRoundRect(10, 20, 2, 8, 2, WHITE);
display.display();
delay(100);
}
}
for (m = 128; m >= 0; m -= 4)
{
int servomap = map(m, 128, 0, 121, 60);
Distance = Distance_value();
//Serial Print for Processing IDE
Serial.print(servomap); // Sends the current degree into the Serial Port
Serial.print(","); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
Serial.print(Distance); // Sends the distance value into the Serial Port
Serial.print("."); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
if (Distance > 40 ) {
display.clearDisplay();
Servo1.write(servomap);
display.drawLine(64, 32, m, 0, WHITE );
display.display();
delay(100);
}
else if (Distance >= 0 && Distance <= 40)
{
int xmap2 = map(Distance, 0, 40, 64, m);
int ymap2 = map(Distance, 0, 40, 32, 0);
display.clearDisplay();
Servo1.write(servomap);
display.drawLine(64, 32, m, 0, WHITE );
display.drawCircle(xmap2, ymap2, 3, WHITE);
display.fillCircle(10, 30, 1, WHITE);
display.fillRoundRect(10, 20, 2, 8, 2, WHITE);
display.display(); delay(100); }
}
for (n = 0; n <= 10; n += 2)
{
int servomap = map(n, 0, 10, 61, 40);
Distance = Distance_value();
//Serial Print for Processing IDE
Serial.print(servomap); // Sends the current degree into the Serial Port
Serial.print(","); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
Serial.print(Distance); // Sends the distance value into the Serial Port
Serial.print("."); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
if (Distance > 40 )
{
display.clearDisplay();
Servo1.write(servomap);
display.drawLine(64, 32, 0, n, WHITE );
display.display();
delay(100);
}
else if (Distance >= 0 && Distance <= 40)
{
int xmap1 = map(Distance, 0, 40, 64, 0);
int ymap1 = map(Distance, 0, 40, 32, n);
display.clearDisplay();
Servo1.write(servomap);
display.drawLine(64, 32, 0, n, WHITE );
display.drawCircle(xmap1, ymap1, 3, WHITE);
display.fillCircle(10, 30, 1, WHITE);
display.fillRoundRect(10, 20, 2, 8, 2, WHITE);
display.display();
delay(100);
}
}
}
int Distance_value() //funtion to get the distance value
{
digitalWrite(Trig, LOW);
delayMicroseconds(2);
digitalWrite(Trig, HIGH);
delayMicroseconds(10);
digitalWrite(Trig, LOW);
duration = pulseIn(Echo, HIGH);
distance = (duration / 2) / 29.1;
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(100, 25);
display.println(distance); //display distance value on oled display
delay(15);
display.display();
return distance; //return the distance value
}